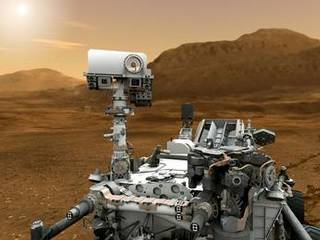
Today marks the start of Sol 24, a crucial phase in our mission to explore Mars. The primary focus of this plan is to test software that will enable the rover to automatically avoid obstacles during its journey towards Glenelg. If successful, this technology will allow us to drive further and faster towards our goal, providing us with an unparalleled view of the intersection of three different terrain types.
To reach Glenelg quickly, we are utilizing autonomous navigation capabilities that we are currently testing. These capabilities will allow us to navigate through the rugged terrain with precision and ease, ensuring that we make it to our destination on time.
After the drive, there will be time for scientific observations. Despite being my last shift as SOWG Chair for a few weeks, today’s planning went smoothly. However, one of the main challenges faced was the low data volume expected to be relayed by the Mars Reconnaissance Orbiter for planning Sol 25. This may not be enough data to plan another drive, but we hope to receive more data than anticipated.
If we do not receive at least one stereo pair of images of the terrain ahead of the rover after the drive, we may have to pause for a sol. While this would not be a problem, we are eager to reach Glenelg, which is about 400 meters away. Confirmation was received that all Mastcam characterization data has been collected, allowing us to plan new Mastcam observations. This was a relief to the science team as incorporating this data into plans over the past week required careful consideration and planning.